|
・In English
前提知識/関連知識
・PID制御とは
・Scilabの使い方
・むだ時間 , 1次遅れ系 , 積分系
■PID制御 ステップ応答法とは
PID制御のゲインを設定する方法の一つに、ステップ応答法があります。
これは制御対象物の特性を物理モデルで表現できない場合に、実験的にゲインを決めることのできる手法です。
ただしこれは経験的に導かれた手法であり、決定的ではありません。またこの手法はむだ時間+1次遅れ要素のある、定位性※の制御対象に限定されます。
※定位性とは、入力値が決まると、それに対応して出力値が決まる性質の事です。対して入力値が決まっても出力値が一意に決まらない性質を
無定位性といいます。無定位性の例としては積分器が含まれる制御対象があげられます。
なお、その他の実験的にゲインを決める手法として、限界感度法があります。
■ステップ応答法のチューニング方法
あるステップ入力を与えたときの出力を以下とした時に、その特性からゲインを決めます。

上記図において、むだ時間をL、時定数をT、収束値をKとしたときに、ゲインは以下となります。
これはチェン・フローネス・レスウィックの方法(CHR法)となります。

なおこのゲインは以下式を前提に設定する場合は値が異なりますが、結果は同じになります。


■Scilabによるステップ応答法のシミュレーション結果
大きさ1のステップ入力、制御対象はむだ時間L=0.2秒、時定数T=1秒、ゲイン=1のため、パラメータは以下となります。
<20%オーバーシュート時のパラメータ>
Kp = 0.95/0.2 = 4.75
Ki = 0.7/0.2 = 3.5
Kd = 0.447
PID制御の設計結果、シミュレーション結果は以下のとおり。なおここで使用している微分器はScilab標準の物ではなく、こちらの様にしています。
その理由はこちらで説明しております。

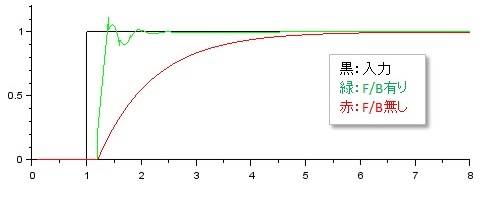
結果を見るとF/Bを行う事で収束性は上がったのですが。少しいびつな形をしています。これは微分操作が影響しており、
上記微分器の出力部分を下記の様にモニタしてみると、微分器への入力値が変化した時に大きな値になっています。
<微分器の出力結果>
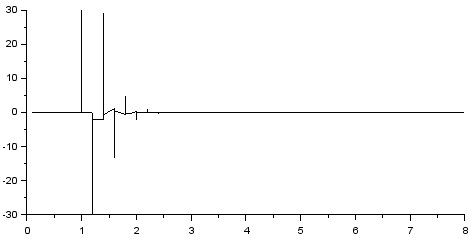
この様に目標値等が急変した時に微分動作の影響によって操作量が急変することをキックといいます。
この対策の一つとして微分ゲインを小さくします。CHR法とは異なる値になってしまいますが仕方ありません。
Kd=0.45から0.25にした時の結果は以下のとおり、いびつな形ではなくなりました。
<Kd=0.25の場合>

またその他にキックを抑える方法は、不完全微分を行うか、微分先行型PID制御を用いる方法があります。
サブチャンネルあります。⇒ 何かのお役に立てればと
|