
|
極配置法の考え方はこちらで説明しましたが、具体的な事例として1次遅れ系をP制御で
コントロールする場合を考えたいと思います。
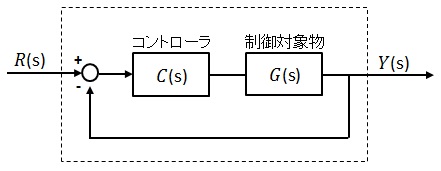
この系の閉ループ伝達関数は以下となります。伝達関数の合成の仕方はこちら。
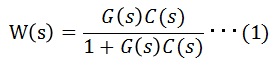
ここで、

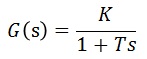
であるため、(1)式は以下となります。

■特性方程式
(2)式の特性方程式は以下となります。

ここで、

■複素平面上に表現
求めたsを複素平面上に表すと以下になります。K,Tが正であるならば対象物は安定化する性質を持っています。
そしてKcの値を変えることで、収束性を向上させることが出来ます。これがF/BゲインKcの役割です。ただし現実的には
Kcをいくらでも大きく出来るわけではなく、ハードウェア等の制約が出てきます。これは別途説明します。
またsの性質として、F/BゲインKcを変えても値が実数にしかならない為、対象物は振動しない
という事が解ります。

■最終値の定理
P制御と1次遅れ系でもう一つ重要な特性として、目標値に必ず収束せず定常偏差を残すという特性があります。
その理由を説明します。
最終値の定理とは、安定な時間関数F(t)が時間が十分経過したときの値として、以下が成り立つというものです。

上記で説明したP制御+1次遅れ系 W(s)に、R(s)を入力した時の最終値Y(s)を求めます。R(s)は固定値rを入力するものとし、
これをラプラス変換すると以下となります。

最終値の定理より、

(2)(3)式を上式に代入すると、

ここでs=0とすると以下となります。

上記式の意味することは、以下部分は1にはならない為、出力y(∞)は入力rに一致しないという事です(Kcを限りなく大きくすれば1に近づくことが出来ますが)。
これが先ほど述べた、目標に収束せず定常偏差が残る理由となります。


■ゲイン設定値
以上を踏まえると、1次遅れ系に対するP制御のゲインは、(ハードウェアの制約が許す限り)大きければ大きいほど良いという事になります。
しかし必ず定常偏差が残ってしまうので、1次遅れ系に対してはそもそもP制御は最適な手法とは言えません。定常偏差を解消するための手法の一つである、
PI制御について説明します。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|