現代制御 オブザーバによる状態フィードバック |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
前提知識
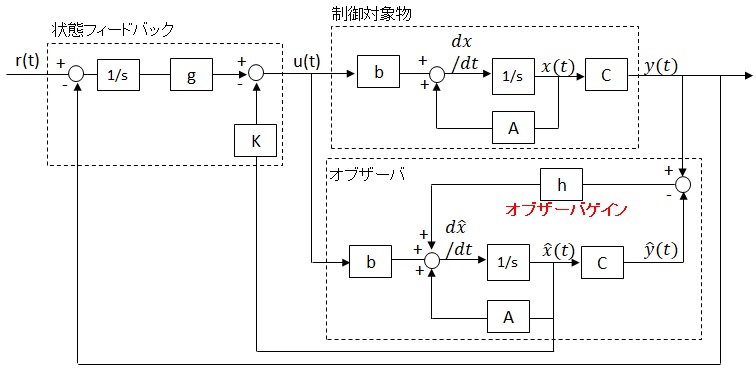
こちらでオブザーバによる状態推定方法について説明しましたが、ここではオブザーバで求めた状態推定値を用いて、
実際に状態フィードバックする方法を説明します。形は以下のとおり。状態フィードバックについてはこちらを参照。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||