
|
前提知識
・2次システムの状態フィードバック(レギュレータ問題)
・1次システムの状態フィードバック(サーボ問題)
・Scilabの使い方
こちらで2次システムの状態フィードバック制御の仕方について説明しました。そこで説明したのはレギュレータ問題と言い、
平衡状態を保っていたシステムが、外乱などで平衡状態からずれたものを、元の平衡状態に戻すのを目的としてました。
ここでは、サーボ問題と言ってシステムを狙いの値に追従させるのが目的となります。サーボ問題の詳細は1次システムを例にも説明しています。こちらを参照。
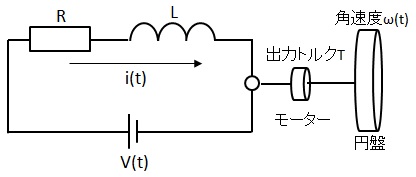
以下電気回路+モーターにおける角速度ωを狙いの値にコントロールしたいと思います。
フィードバックの形は以下となります。

ゲイン設定の考え方としては、入力r(t)と出力y(t)が一致するようにgを設定するという事です。
それでは具体的なゲインの求め方を説明します。まず、上記システムの微分方程式は以下となります。

上記におけるフィードバックゲインgは以下となります。詳細はこちらを参照。

分母に行列があってぱっと計算できそうにないと思われますが、実際に計算すると1x1の行列式になりスカラーとなるので計算可能です。
実際に計算してみます。A,b,c,kは以下とします。パラメータの根拠はこちらを参照。

計算過程はこちらで示しますが、ゲインgは0.72となります。
■Scilabでの設計
Scilabでの設計結果は以下となります。モーターシステムの状態フィードバック制御についてはこちら参照。


■シミュレーション結果
以下となり目標値に追従していることが解ります。

■この手法の欠点
この手法は制御対象物の特性が全て正しいことを前提にゲインを設定しているので、温度や劣化等で制御対象物の特性が変わった時や何かしらの
外乱が入った時は目標値に追従させることができず、ロバスト性が低いのがこの制御の欠点となります。実際に外乱を与えた時に結果を以下に示すします。


それではこの問題を解消するための方法をこちらで説明します。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|