現代制御 1次システム(RL回路)の状態方程式 |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
・In English
■1次システム(RL回路)の状態方程式の求め方
現代制御で扱う状態方程式の求め方を、1次システムである以下RL回路を用いて説明します。1次システムとは1階微分の微分方程式が記述できるシステムの事で、
一般的にn次システムとはn階微分の微分方程式となります。
■状態方程式, 出力方程式の導出
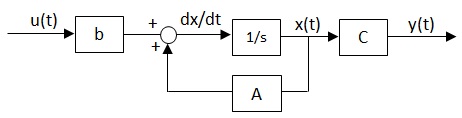
状態方程式と出力方程式の一般式は以下のとおり。 ■状態方程式をブロック図で表現
上記状態方程式の一般系をブロック図で表現すると以下となります。 ■Scilabで動作を確認
scilabで設計すると以下となります。2パターン用意してあり、上側の数式の書いたブロックは状態方程式を表し、パラメータを入れるだけで下側のブロックと同じような動作を実現できます。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||