現代制御 2次システムの状態フィードバック(内部モデル原理) |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
前提知識
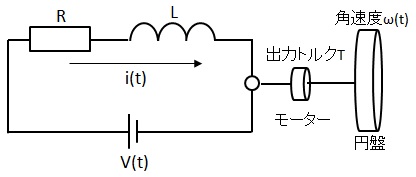
こちらで2次システムの状態フィードバック制御の仕方について説明しました。そこで説明したのは外乱などには弱いシステムでした。
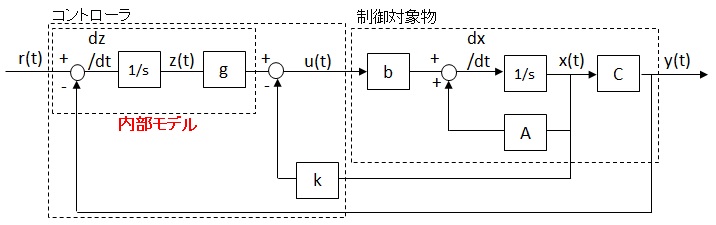
ここでは内部モデルを使って、外乱が入っても目標値に追従させる方法を説明します。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||