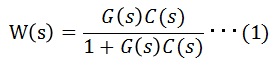
From the above, equation (1) becomes the following. (Reference: calculation process)
■Characteristic equation
The stability of the system can be determined by the value of the solution to the characteristic equation (2), so first calculate the solution to the characteristic equation.
Here we use the idea of a reference model.
<reference model>
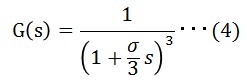
Assume the following transfer function.
The solution (pole) s of this characteristic equation is as follows, so if σ is a positive value, it is stable, and if the value of σ is small, the convergence speed increases.
If you can express the solution of the characteristic equation in equation (3) in the same form as equation (4), you can set parameters that are stable and have a fast convergence speed.
A transfer function that serves as a model like this is called a reference model. Now, I will explain the specific method.
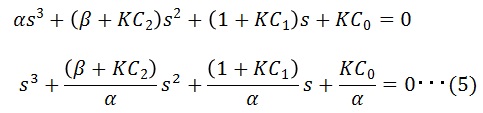
The characteristic equation of (3) is as follows.
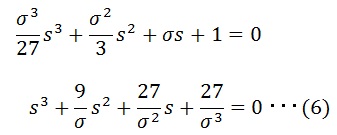
The characteristic equation of (4) is as follows.
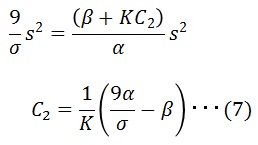
From equations (5) and (6),
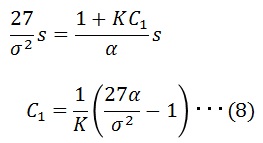
Also,
Also,
Now, by substituting equations (7), (8), and (9) into equation (2) and tuning σ, it is possible to set the desired gain.
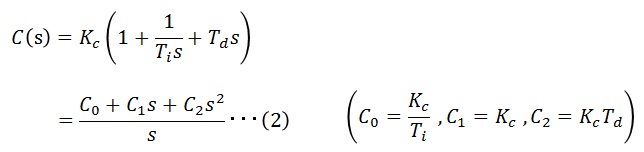
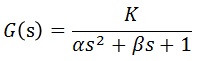
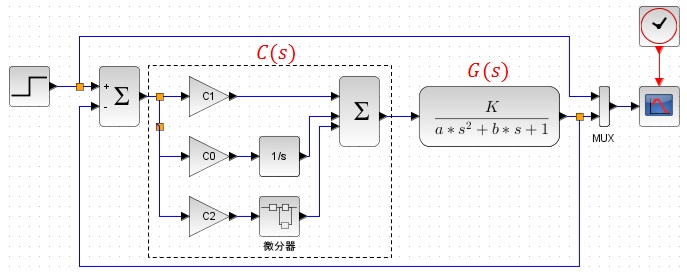
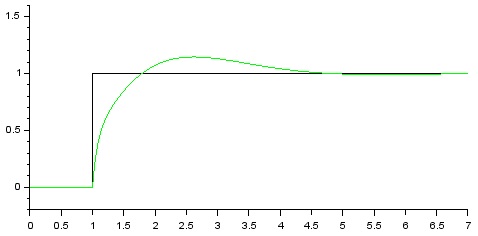
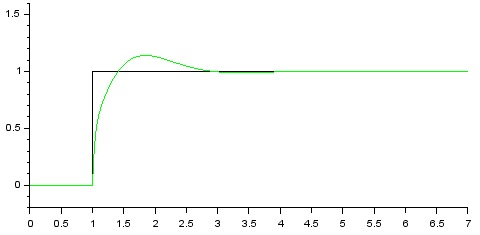
■Second-order delay system + PID control operation