PID controller with filtered derivative |
|||||||||||
|
・In Japasene
■What is filtered derivative?
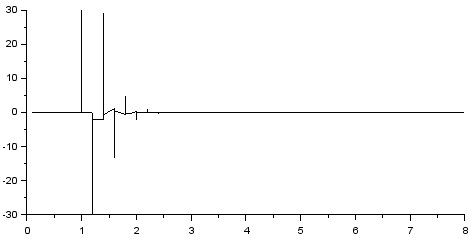
A filtered derivative is a process in which a low-pass filter is added to the differentiator, and it is used to suppress a sudden change (called a kick) in the output due to the derivative term of PID control.
The transfer function is as follows. The filtered derivative is also used for highpass filters.
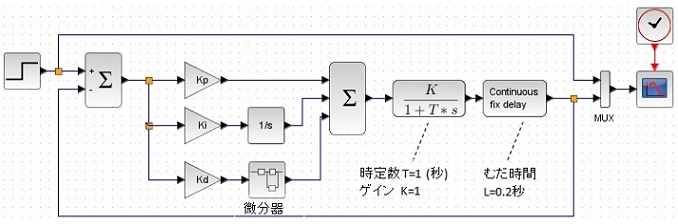
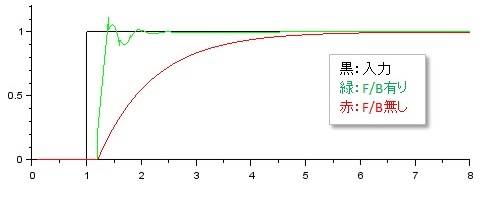
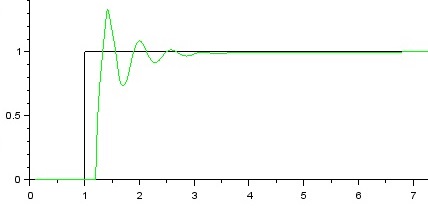
■PID control without filtered derivative
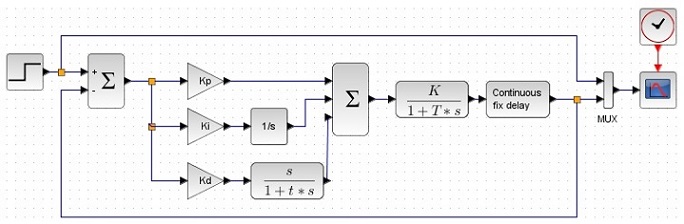
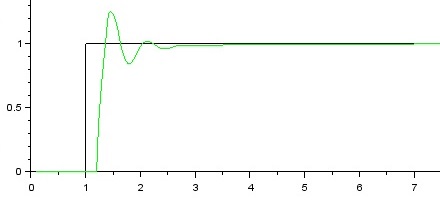
The following is an example of PID control of a controlled object with characteristics of dead time + first-order lag. ■PID control with filtered derivative御
Replace the normal differentiator with a filtered derivative as follows.
|
|
|||||||||