The basic form of PID control is as follows. This form is called position-type PID control in contrast to velocity-type PID control.
■velocity-type PID control
Velocity-type PID control is a form that adds the change (differential) of PID control to the previous operation amount as shown below.
This is the reason why it is called velocity-type PID.Differentiation of position is velocity
Under normal conditions, the movement is the same as position type PID control, but velocity type PID control may have an advantage.
I'll explain why, but before that, I'll add a little more explanation.The above can be modified as follows.
■Design of velocity type PID control
When designed in Scilab, it is as follows. The contents of the differentiator and the controlled object are here.
Although it is divided by 1000 on the way, it depends on the simulation environment and affects the process of integrating the previous value.
This is an integration of the value 0.001 seconds ago, and it is divided by 1000 because it needs to be converted to an integrated value for 1 second.
<parameter>
Kp=4.75 , Ki=3.5 , Kd=0.25
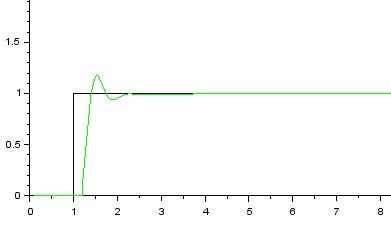
The simulation results are the same as those for position-based PID control, as shown below. Click here for the results of position type PID control.
■Advantages of velocity-type PID control
The advantage of velocity-type PID control is that reset windup is not required.
<What is windup?>
When actually controlling, the amount of operation may be limited due to restrictions on the controller.
In position-based PID control, if the target value is never converged, the value of the I term will continue to accumulate.
This condition is called windup.
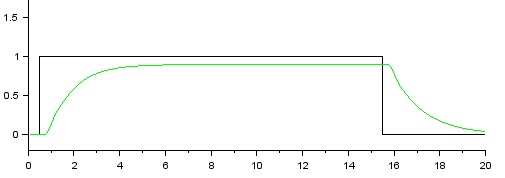
Check windup behavior. Add a saturation block to the PID control as follows. The upper limit is 0.9 and the lower limit is 0.
■Position type PID control <simulation result>
The problem when windup occurs is that when the target value changes, it becomes difficult for the controlled object to follow the target value.
As a countermeasure against windup, it is necessary to reset I-item under certain conditions.
This poses a problem in position-based control. Now, let's see what happens with velocity-type PID control.
■Velocity type PID control
Check the operation by attaching a saturation block to the velocity-type PID control.
As shown below, the problem of deterioration of target tracking performance due to windup can be resolved without implementing windup countermeasures.
Windup occurs not only when the amount of operation is limited, but also when switching ON/OFF of PID control operation manually.
At this time, velocity-type PID control does not require windup countermeasures.